A generative-AI project, awarded second place at Widener University's AI Day, built around a deceptively simple question: can a machine with no emotions, no feelings, and no real sight come to understand the inner experience of mental illness well enough to paint it?
The premise was a thought experiment. Take a system that has never felt anxiety, grief, or fear, force it to study the conditions that quietly shape millions of lives, and then ask it to show what it sees. If you could lift someone's internal experience out of their head and set it on a canvas, what would it look like — and could an AI get there?
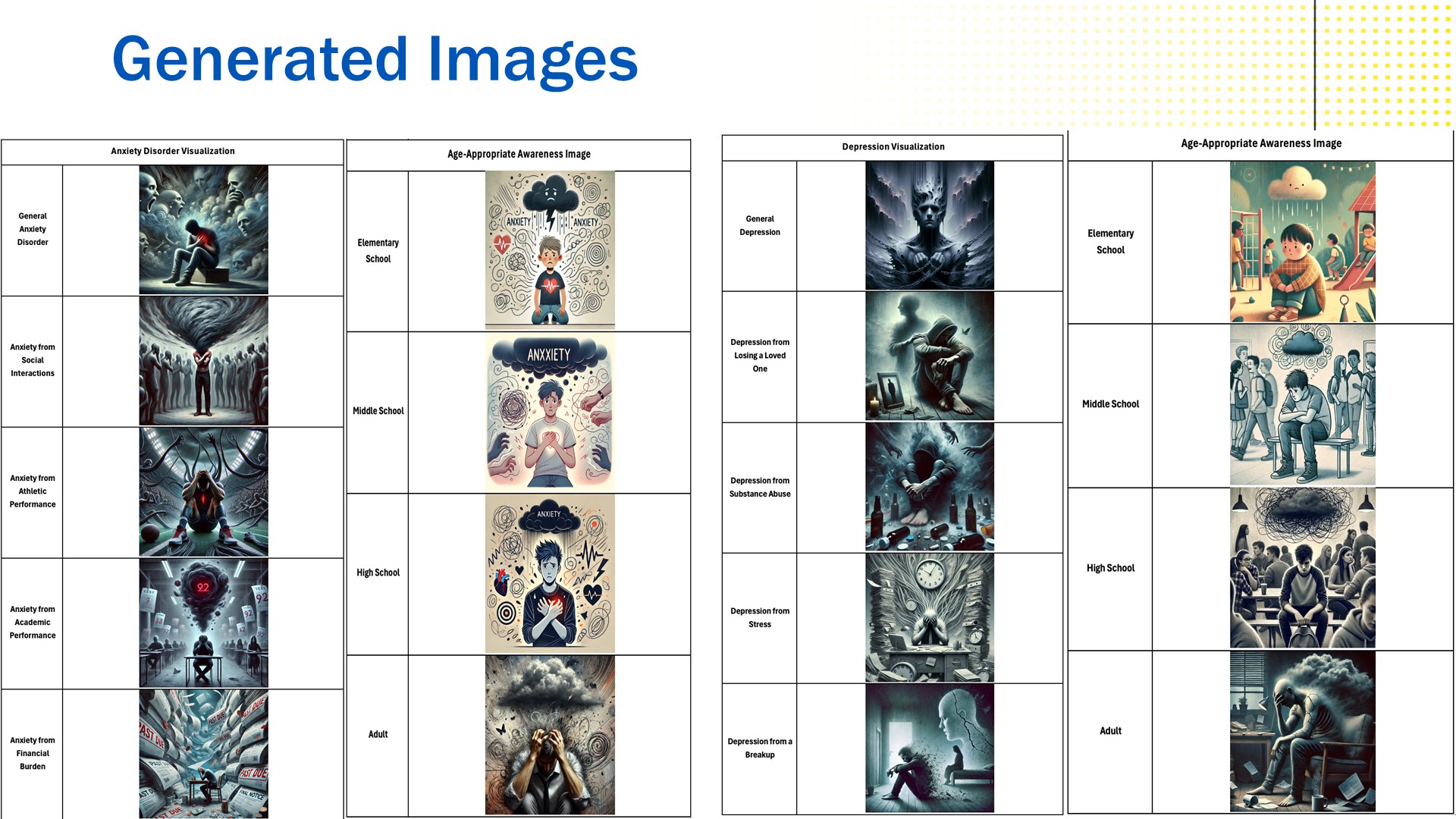
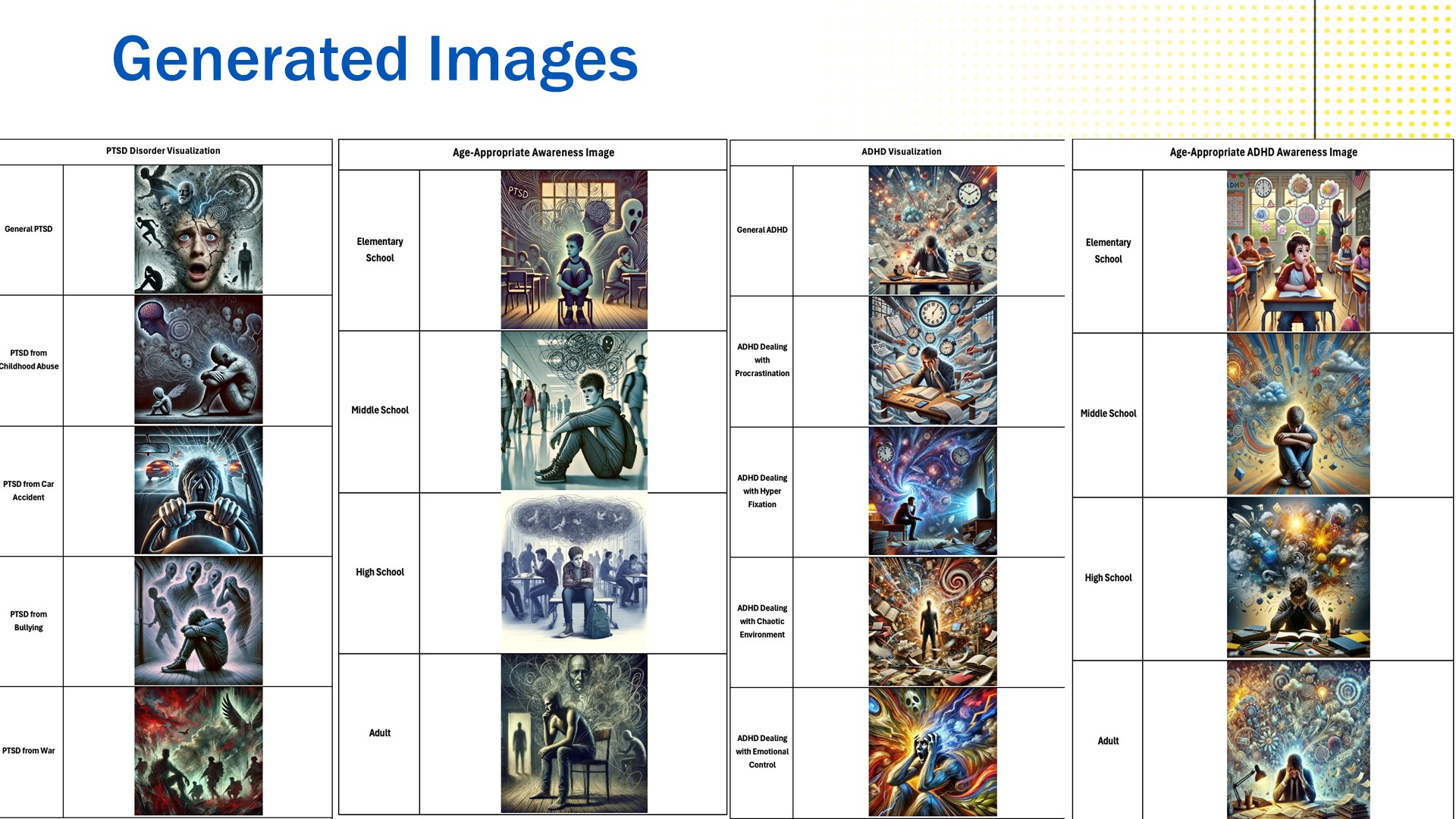
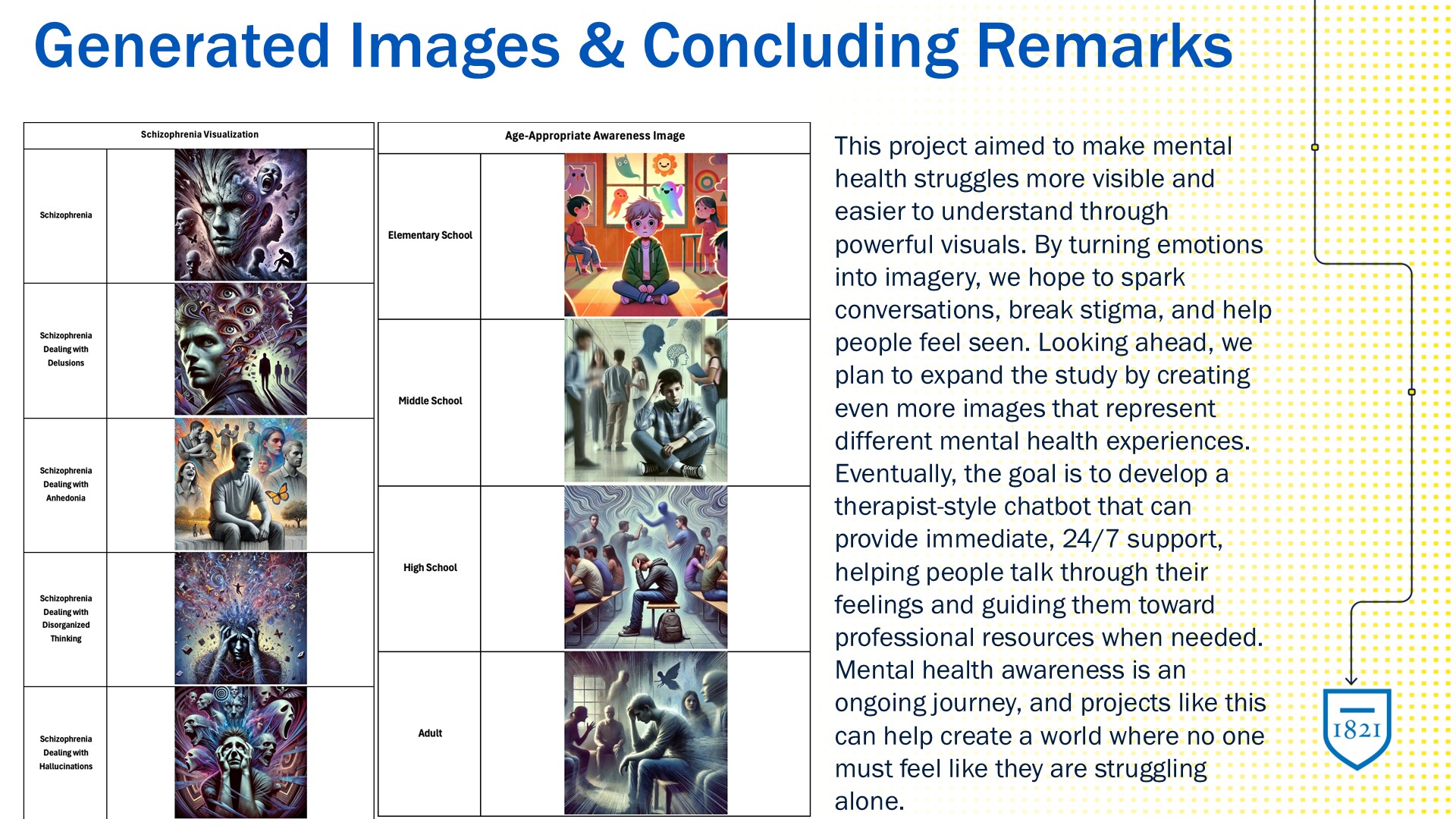
Part one — picturing the illness from the inside
For each condition — anxiety, depression, PTSD, ADHD, and schizophrenia — the model first ran deep research until it had a complete, grounded understanding of how the illness actually presents. Only then was it asked to generate an image of how it imagined living with that condition from the inside: not a textbook diagram, but an attempt to render the feeling itself. To me, that was the only real way to test whether these models could truly understand and visualize something so human.
Part two — building empathy in children
The second half turned the research toward education. Some of what drives mental illness is too heavy or too adult to put in front of a child directly — you don't pull a first-grader aside to detail the trauma behind a veteran's flashbacks. But you can say that someone went through something hard, and show an age-appropriate image that helps a child feel the empathetic side: that some people carry invisible struggles. From the other direction, a child who sees themselves in an ADHD image can finally ask for help instead of silently wondering, "what's wrong with me?"
Generative AILLM deep researchImage generationMental-health educationEmpathy & stigma